How to Install original Doom on the Raspberry Pi® Pico
- Sep 30, 2022
- 6 min read

What is Doom?
For gamers in the 1990s if you wanted to spend your days atomizing netherworld nasties with lasers, missiles, and big bullets, there was only one game franchise that you'd invest your time in - the ground breaking, first-person shooter Doom. Considered one of the pioneers in 3D graphics, networked multiplayer, and player mod support, Doom laid waste the zombies for others to follow.
For those that don't know - the premise of Doom is relatively simple. The game begins as an unnamed space marine sent to a facility where a science experiment has gone wrong. (Your character became known as 'Doomguy' by default and you can see his state of health update before your eyes in the handy console at the foot of the screen) All your other crew are dead, and you’re the last man standing in the way of an unholy demonic invasion of planet Earth. Your mission, should you choose to except it, is pretty straightforward. Shoot the living hell out of everything in your path and find and kill the mastermind behind the evil invasion.

Why did we want to run Doom on a Raspberry Pi® Pico?
Back in the day, you needed a reasonably high-spec tower PC to run Doom's ground-breaking 3D graphics. Of course computer processing power has evolved significantly over 28 years but it is still remarkable that the same game can be run perfectly on a set up costing less than $50. As Ineltek has been appointed as an official distributor for Raspberry Pi®, what better way of showcasing the power, performance and flexibility of their RP2040 MCU to our target customers, than through the nostalgia for a 90s classic pc game?
How to create our Doom set up on Raspberri Pi® Pico
We've done all the hard work for you (with a lot of help from other online resources) so you will hopefully be up and running with your own Doom set up in no time.
Equipment
You will need:
Raspberry Pi Pico H Raspberry Pi Pico - Pimoroni
Pimeroni Pico VGA Demo Base Pimoroni Pico VGA Demo Base - Pimoroni
USB keyboard (we used the Raspberry Pi Keyboard) Raspberry Pi Keyboard(UK layout) - Pimoroni
Aux audiocable (Male to male 3.5 mm)
2 x USB to micro USB cables
Female to male VGA cable
TV/Monitor
Additional equipment may be required, depending on which inputs you have on your TV or monitor.
If your TV/monitor has a VGA input you can just plug your VGA cable directly in to your device. You may also be able to plug the audio cable in if your chosen device supports audio. If not, you could plug it into an external speaker.
A more elegant solution suitable for a much wider range of display options is to convert both the VGA and audio DAC signals from the VGA demo board into a single HDMI output than can be plugged straight into any TV with a HDMI input. This requires a VGA/Stereo Audio to HDMI converter (we found one by Multibao off Amazon) and a standard HDMI cable.
All set? Let's get into it!

Software
We need to flash two files to the RP2040.The first one is called“doom_tiny_usb.uf2” which gives your Pico the ability to run doom (the drivers etc). The second one is the doom game itself “doom1.whx”.
Step 1 – Downloading the Doom Files
Download both files from Graham Sanderson’s Github (he’s a Raspberry Pi® employee): “doom_tiny_usb.uf2” Releases · kilograham/rp2040-doom · GitHub
“doom1.whx” GitHub - kilograham/rp2040-doom: Fully-featured Doom port for the Raspberry Pi RP2040 microcontroller
There a lot of files on these pages but you only need to download the two mentioned. Save the uf2 file to C:\Users\[your_name], we will change the location of the other file later.
Step 2 – Setting up File Directories and Flashing the First File
Now we need to install the Raspberry Pi® Pico toolchain. [1] Raspberry Pi® has a useful Getting Started guide for the Pico that covers installation steps for all the major operating systems.
On Linux you can run a single script that will install everything for you. On macOS, you need to use 'Homebrew' to install the toolchain, which only requires a few commands in the terminal.
The process for Windows is a bit more involved, so we will tackle it below:
1. Lets get organised! Create a new file named VSARM in the top level of your C drive. Next inside this file create 4 files called ‘armcc’, ‘lib’, ‘mingw’ and ‘sdk’.
2. Install GitBash for Windows https://git-scm.com/download/win (all the default installation options are fine).
3. Now we are ready to flash the “doom_tiny_usb.uf2” to our Pico! To do this, hold down the bootsel button on your Pico as you plug it into your laptop or computer.
4. Find which drive letter the RPI-RP2 drive is mounted to – (ours was d, just check on your file explorer and replace the /d/ in the line below accordingly)
5. Enter the command below and the file will be flashed:
cp doom_tiny_usb.uf2 /d/ 6. Create a new foldercalled “pico” in the sdk folder we created earlier.
7. Enter the following commands in GitBash:
cd /c/VSARM/sdk/pico
git clone -b master https://github.com/raspberrypi/pico- sdk.git
cd pico-sdk
git submodule update--init cd ..
git clone -b master https://github.com/raspberrypi/pico- examples.gitThe Pico-examples aren’t necessary for getting Doom running, so feel free to omit these commands, but they provide a useful reference and starting point for any future Pico projects!
8. We will also update the environment variables for out pico-sdk.
In the Windows search bar, enter env. Click on Edit the system environment variables.
In that window, click on Environment Variables…
Under User variables for <username>, select Path and click Edit.
Variable name: PICO_SDK_PATH
Variable value: C:\VSARM\sdk\pico\pico-sdk
Step 3 – Flashing the Second File
Now we have installed the Raspberry Pi Pico toolchain and flashed our first file. For the “doom1.whx” file we want to flash to a specific point in the flash storage on the Pico – this requires a tool called Picotool.
1. We are going to need another version of Git which will help us build Picotool on Windows. Install Git for Windows SDK here https://gitforwindows.org/#download-sdk (The latest 64-bit version). Run the installer, accepting all the defaults. This will open a command prompt window and begin to download/install Git for Windows SDK. We are going to use a feature of this version of Git called Pacman- this is a package manager that will let us easily install the libraries and software we need.
2. Run C:\git-sdk-64\git-bash.exe and enter the commands:
pacman -Syu
pacman -Su
pacman -S mingw-w64-x86_64-toolchain git make libtoolpkg- config autoconf automake texinfo wgetWhen prompted hit enter to install all the packages. Then enter Y twice to the consecutive questions.
Enter the following commands to install libusb-1.0.23:
cd ~/Downloads
wget http://repo.msys2.org/mingw/x86_64/mingw-w64-x86_64- libusb-1.0.23-1-any.pkg.tar.xz
pacman -U mingw-w64-x86_64-libusb-1.0.23-1-any.pkg.tar.xzAt the next question enter Y again to continue with the installation. Now we are ready to build Picotool!
3. In the GitBash window enter the following commands to install picotool:
cd /c/VSARM/sdk/pico git clone -b master
https://github.com/raspberrypi/picotool.git cd picotool
mkdir build cd build
cmake -G "MinGW Makefiles" -DPC_LIBUSB_INCLUDEDIR="/c/git- sdk-64/mingw64/include/libusb-1.0" ..
make
cp /c/git-sdk-64/mingw64/bin/libusb-1.0.dll .
cp /c/git-sdk-64/mingw64/bin/libgcc_s_seh-1.dll .Do a quick test to check Picotool is working okay, enter the command and it should spit out some info and then exit:
./picotool.exeWe need to install a driver to send commands over USB to the Pico from Picotool. Here are some instructions from How to Build OpenOCD and Picotool for the Raspberry Pi® Pico on Windows - Shawn Hymel:
Put your Pico board into bootloader mode (press and hold BOOTSEL and plug in the USB cable). It should enumerate on your computer as a storage drive.
Head to https://zadig.akeo.ie and download Zadig
Run Zadig. Select Options > List All Devices
You should see 2 Pico devices in the drop-down menu: RP2 Boot (Interface 0) and RP2 Boot (Interface 1). Select RP2 Boot (Interface 1)
The driver should be listed as (NONE). Select libusb-win32 (some version) as the replacement driver.
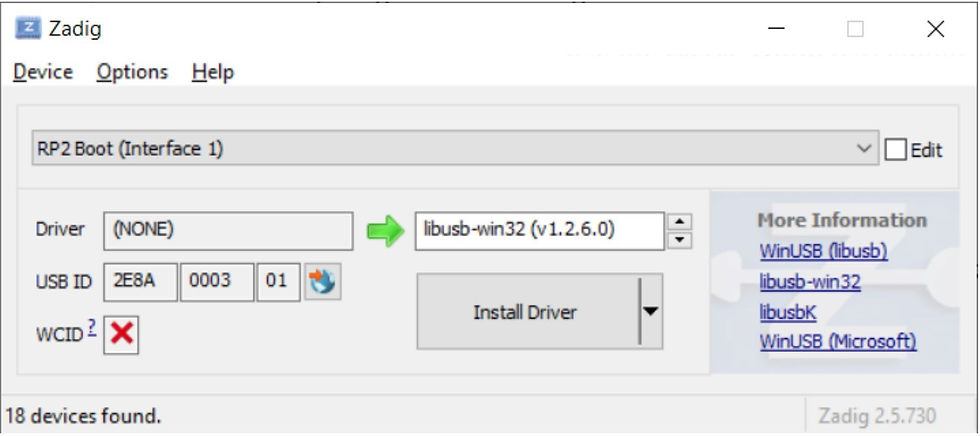
Click Install Driver. When it’s done the current driver should be listed as ‘libusb-win32’.
If you break something in Zadig (which we did!), you can fix it. For example, the Pico will not enumerate as a mass storage device drive in Bootloader mode. Zadig will show something other than “USBSTOR” as the driver for RP2 (Interface 0).
Here is how to delete the bad drivers and let Windows fix the mess you made:
Put Pico into Bootloader mode and open Device Manager
Click View > Devices by container
Expand RP2 Boot
For all entries under RP2 Boot: - Right click on entry and select uninstall device - Check “Delete the driver software for this device (if asked) - Click Uninstall
Unplug Pico
Hold BOOTSEL and plug it back in to put it into bootloader mode again
Windows should automatically reinstall all the correct drivers
5. Save a copy of doom1.whx to /c/VSARM/sdk/pico/picotool/build
6. With the Pico in bootloader mode (hold bootsel down), open the Git SDK window and enter the following commands:
/c/VSARM/sdk/pico/picotool/build/picotool.exe
picotool load -v -t bin doom1.whx -o 0x10042000.The second file will have been flashed to the Pico and Doom is ready to play!
Now go and Shoot some Demons!



